Mohamed Nagy Mostafa
PhD Candidate in Electrical & Computer Engineering at Khalifa University
Research Focus: Multi-Object Tracking | State Estimation & Uncertainty | Robotics Perception
PhD Candidate in Electrical & Computer Engineering at Khalifa University
Research Focus: Multi-Object Tracking | State Estimation & Uncertainty | Robotics Perception
This work addresses limitations in 3D tracking-by-detection methods, focusing on legitimate trajectory identification and reducing state estimation drift in Kalman filters. Traditional threshold-based filtering struggles with distant and occluded objects, leading to false positives. We propose a novel track validity mechanism and multi-stage observational gating process that reduces ghost tracks and enhances tracking performance. This work effectively tracks distant objects and prolonged occlusions. It operates at 3221 FPS on a single CPU for real-time tracking.
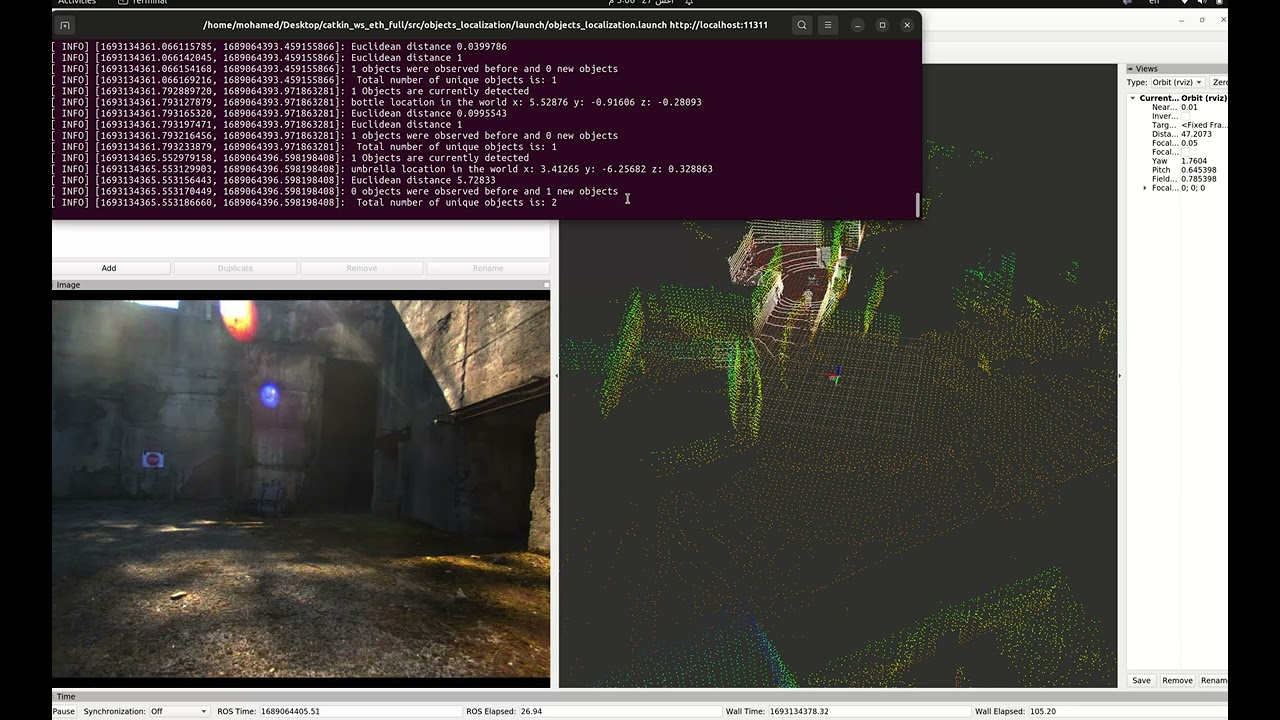
I participated in a robotics summer school at ETH Zurich, where I collaborated with my team to develop a full-stack robot designed for a Segway platform. Our technological stack encompassed perception, mapping, localization, state estimation, navigation, and trajectory optimization. We focused on a ground robot and successfully enabled it to navigate within a designated area, identify objects on the map, thoroughly explore the surroundings, and safely depart from the location.
The primary objective is to monitor multiple targets based on their visual motion captured through an event camera. The Kalman filter has been reformulated and adapted for visual motion estimation. Based on the current observed motion of an object, the proposed Kalman filter predicts the next visual motion state for that object. The results demonstrated its effectiveness for nearby objects, but its performance was less satisfactory with objects at a distance.
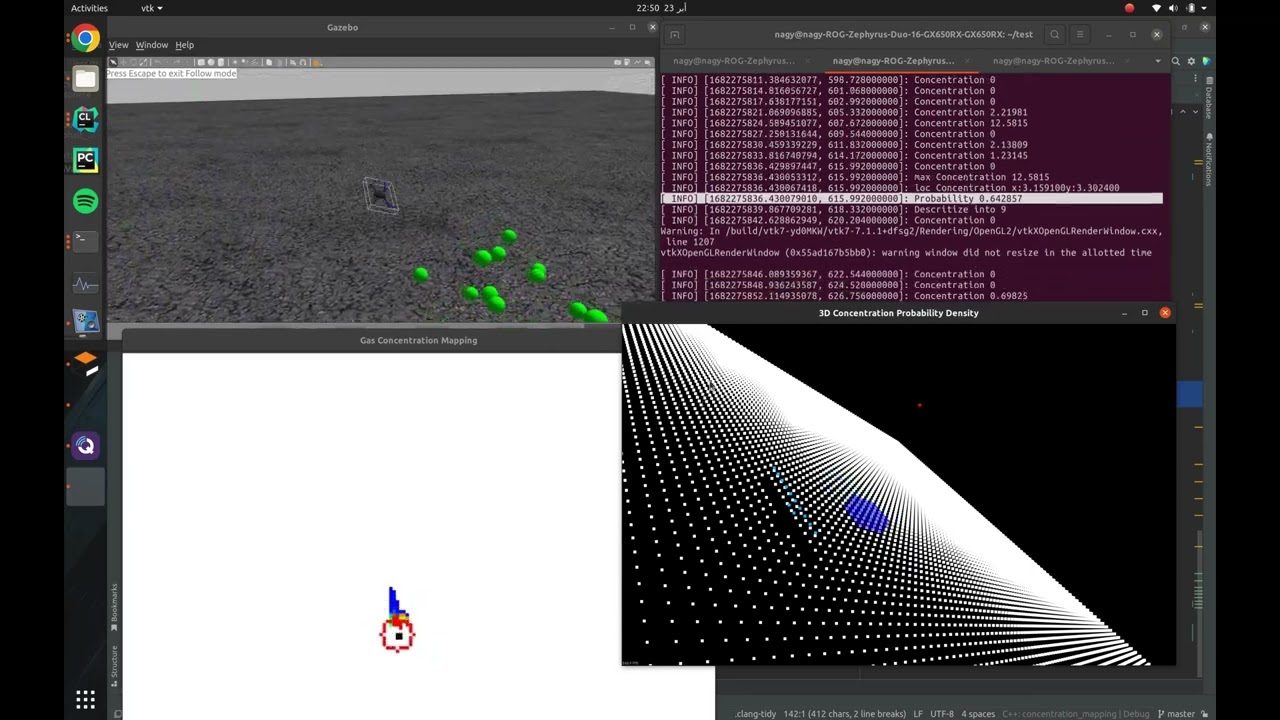
The goal of this project is to investigate outdoor odor diffusion. Initially, a particle shooter is developed to simulate odor dispersion in the Gazebo environment, with the scattering of particles governed by a predefined diffusion model. Additionally, a custom air monitoring sensor is integrated into an AutoPilot drone to measure particle concentration per cubic meter. Ultimately, the drone employs advanced algorithms to detect sources of odor diffusion within the environment. The implementation is carried out in C++.

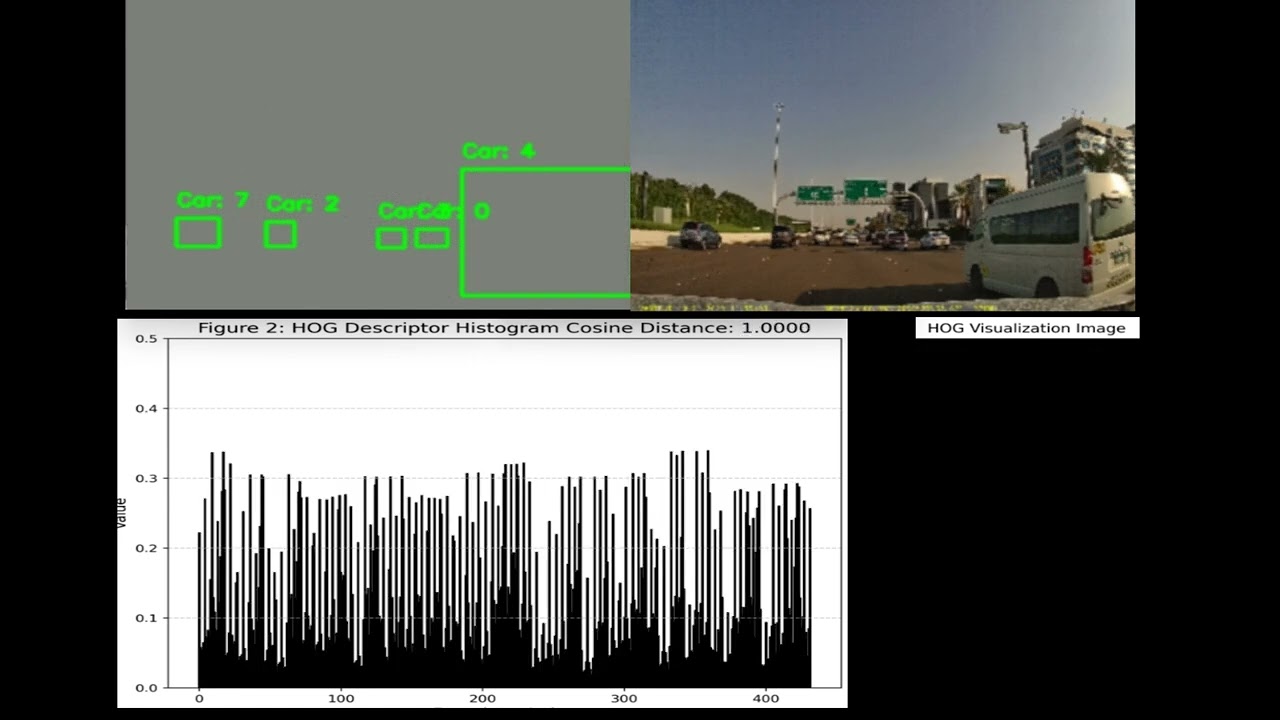
This is my thesis project focused on multi-object tracking for self-driving cars. The project employs a combination of camera, LiDAR, and IMU sensors to continuously track objects within 2D camera frames and a 3D LiDAR point cloud. The trajectories of the objects are derived using a Kalman Filter, assuming constant acceleration. This project has been developed from the ground up (End-to-End) using C/C++, with a portion submitted to ICRA 2023 under the title DFR-FastMOT framework.

In this project, I developed a 3D adjustable grid map for roughness estimation utilizing LiDAR point clouds. The grid consists of small rectangles surrounding the robot, with each rectangle calculating a roughness score based on the point cloud it contains. To accomplish this, I employed the RANSAC algorithm along with the Euclidean distance property. The implementation was done using C++.

In this project, I employed the Modified UNET model to extract drivable surfaces through semantic segmentation, alongside the RANSAC algorithm to map these surfaces into 3D space using a stereo camera (Zed2) depth map. Additionally, the results of the semantic segmentation were used to identify obstacles on the surface. Finally, I leveraged the camera's pose information to create a 2D map of the mobile robot's trajectory and accurately localize the robot within that map.

This research project explores the limitations of deep learning architectures in the context of semantic segmentation. I begin by implementing a U-Net model architecture from the ground up and subsequently enhance the architecture in response to the identified performance weaknesses on the Mapillary Vistas dataset. The final architecture incorporates a downsampling and upsampling hierarchy derived from the U-Net model, skip connections from DenseNet, and parallel convolutional layers featuring kernel sizes inspired by the InceptionV3 model.
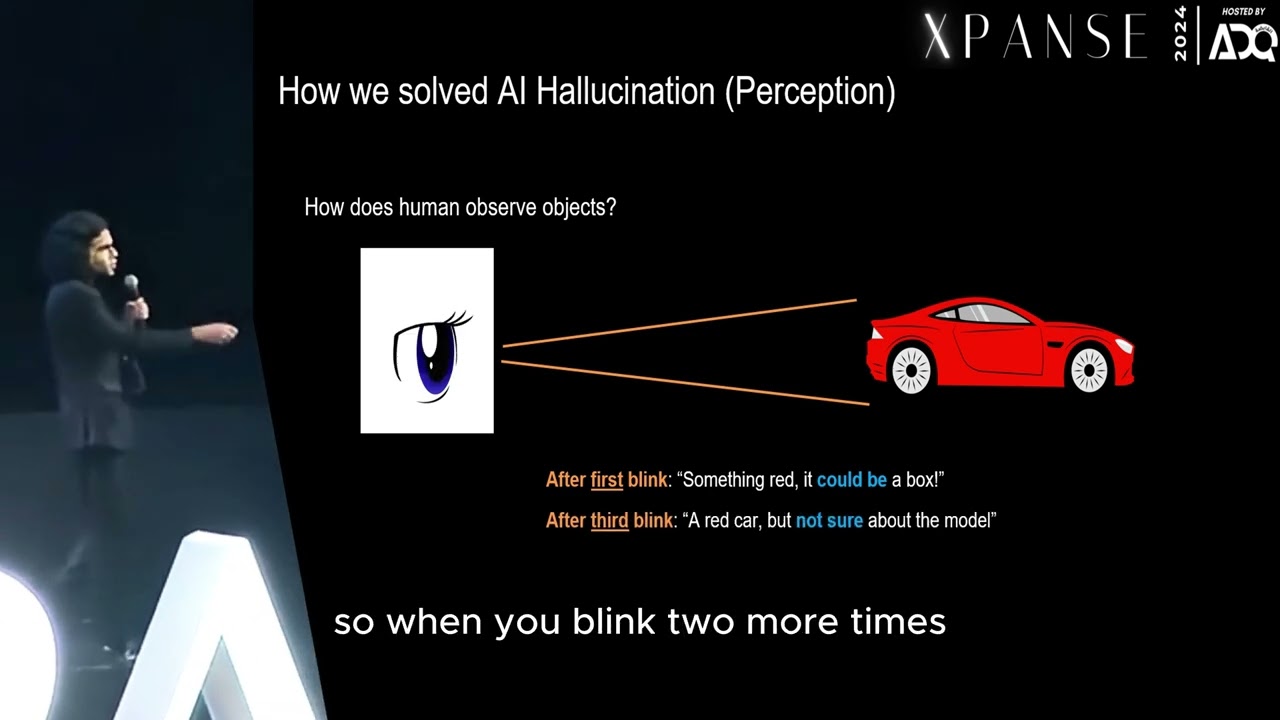
This work addresses the critical lack of precision in state estimation in the Kalman filter for 3D multi-object tracking (MOT) and the ongoing challenge of selecting the appropriate motion model. Existing literature commonly relies on constant motion models for estimating the states of objects, neglecting the complex motion dynamics unique to each object. Consequently, trajectory division and imprecise object localization arise, especially under occlusion conditions. The core of these challenges lies in the limitations of the current Kalman filter formulation, which fails to account for the variability of motion dynamics as objects navigate their environments. This work introduces a novel formulation of the Kalman filter that incorporates motion dynamics, allowing the motion model to adaptively adjust according to changes in the object's movement. The proposed Kalman filter substantially improves state estimation, localization, and trajectory prediction compared to the traditional Kalman filter. This is reflected in tracking performance that surpasses recent benchmarks on the KITTI and Waymo Open Datasets, with margins of 0.56\% and 0.81\% in higher order tracking accuracy (HOTA) and multi-object tracking accuracy (MOTA), respectively. Furthermore, the proposed Kalman filter consistently outperforms the baseline across various detectors. Additionally, it shows an enhanced capability in managing long occlusions compared to the baseline Kalman filter, achieving margins of 1.22\% in higher order tracking accuracy (HOTA) and 1.55\% in multi-object tracking accuracy (MOTA) on the KITTI dataset. The formulation's efficiency is evident, with an additional processing time of only approximately 0.078 ms per frame, ensuring its applicability in real-time applications.
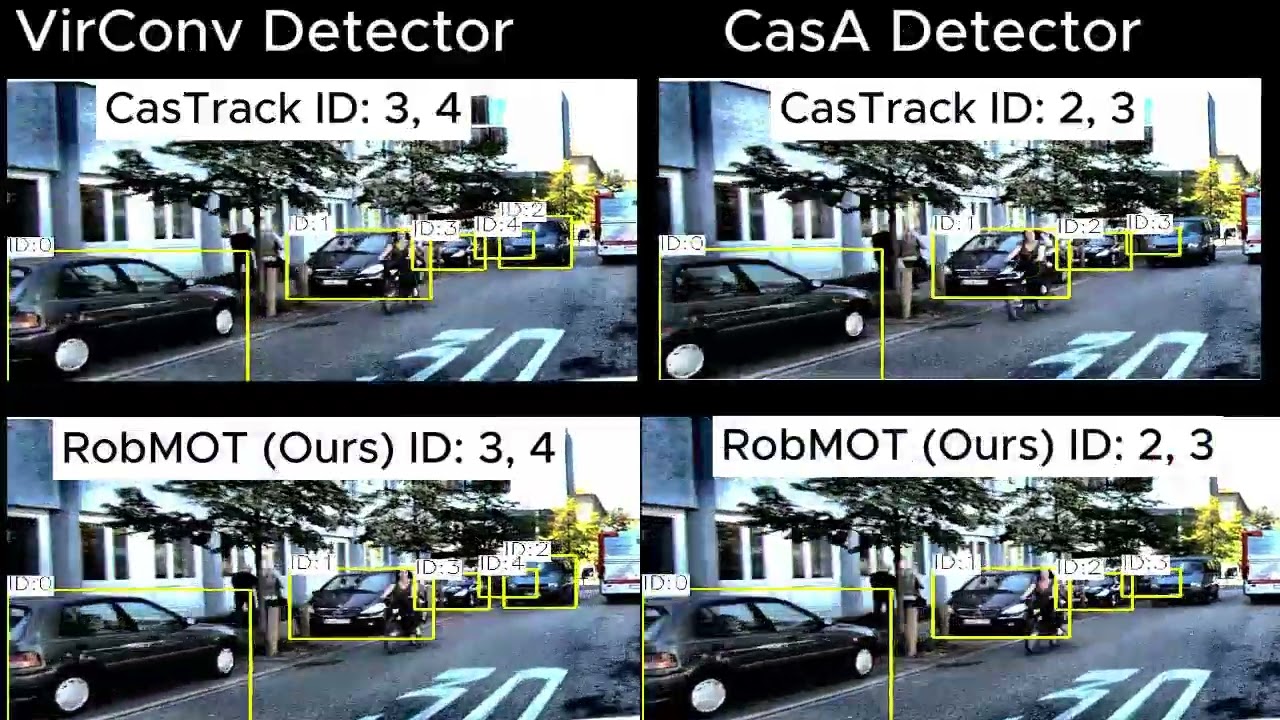
This paper addresses limitations in 3D tracking-by-detection methods, particularly in identifying legitimate trajectories and reducing state estimation drift in Kalman filters. Existing methods often use threshold-based filtering for detection scores, which can fail for distant and occluded objects, leading to false positives. To tackle this, we propose a novel track validity mechanism and multi-stage observational gating process, significantly reducing ghost tracks and enhancing tracking performance. Our method achieves a 29.47\% improvement in Multi-Object Tracking Accuracy (MOTA) on the KITTI validation dataset with the Second detector. Additionally, a refined Kalman filter term reduces localization noise, improving higher-order tracking accuracy (HOTA) by 4.8\%. The online framework, RobMOT, outperforms state-of-the-art methods across multiple detectors, with HOTA improvements of up to 3.92\% on the KITTI testing dataset and 8.7\% on the validation dataset, while achieving low identity switch scores. RobMOT excels in challenging scenarios, tracking distant objects and prolonged occlusions, with a 1.77\% MOTA improvement on the Waymo Open dataset, and operates at a remarkable 3221 FPS on a single CPU, proving its efficiency for real-time multi-object tracking.
Persistent multi-object tracking (MOT) allows autonomous vehicles to navigate safely in highly dynamic environments. One of the well-known challenges in MOT is object occlusion when an object becomes unobservant for subsequent frames. The current MOT methods store objects information, such as trajectories, in internal memory to recover the objects after occlusions. However, they retain short-term memory to save computational time and avoid slowing down the MOT method. As a result, they lose track of objects in some occlusion scenarios, particularly long ones. In this paper, we propose DFR-FastMOT, a light MOT method that uses data from a camera and LiDAR sensors and relies on an algebraic formulation for object association and fusion. The formulation boosts the computational time and permits long-term memory that tackles more occlusion scenarios. Our method shows outstanding tracking performance over recent learning and non-learning benchmarks with about 3% and 4% margin in MOTA, respectively. Also, we conduct extensive experiments that simulate occlusion phenomena by employing detectors with various distortion levels. The proposed solution enables superior performance under various distortion levels in detection over current state-of-art methods. Our framework processes about 7,763 frames in 1.48 seconds, which is seven times faster than recent benchmarks. The framework will be available at https://github.com/MohamedNagyMostafa/DFR-FastMOT.
Analysis of technological advancements and challenges during the COVID-19 pandemic, focusing on the intersection of healthcare and Industry 4.0 technologies.
Novel neural network architecture for improved detection of distributed denial-of-service attacks in network security systems.

I have a deep passion for listening to diverse music, from movie soundtracks to stunning orchestral pieces and popular songs. Music has always been a significant part of my life. As a child, I loved to play Piano and imitate the melodies and rhythms I heard. This early fascination with music blossomed as I grew older and took up the Violin. Playing an instrument is a beautiful way to translate words and emotions into melodic expressions.
I used to have some time a day for meditation, preferring nature areas where I could hear wind, birds' sounds, and the leaves of trees. I use it for relaxation and reflection.
I like to solve puzzles! When I was a kid, I used to play strategic games (Wars), make strategic plans, and anticipate outcomes.
My favorite sport is swimming. I like to spend some time swimming and snorkeling once in a while.

Joining the institute of Automotive Technology as a Visiting Researcher
2026-Present

MSc in Computer Science & Ph.D. Candidate in Electrical & Computer Engineering
2021-Present

NSF AI Institute for Artificial Intelligence and Fundamental Interactions Workshop (Participant & Speaker)
2025

Robotics Summer School Participant
2023

Mentor
2020-2024

Machine Learning Speaker
2018-2020

Andriod Tutor
2018

Research Assistant
2018

Andriod Development Intern
2016

Bachelor's in Mathematics and Computer Science
2014-2018